در گفتوگو با آنا بررسی شد؛
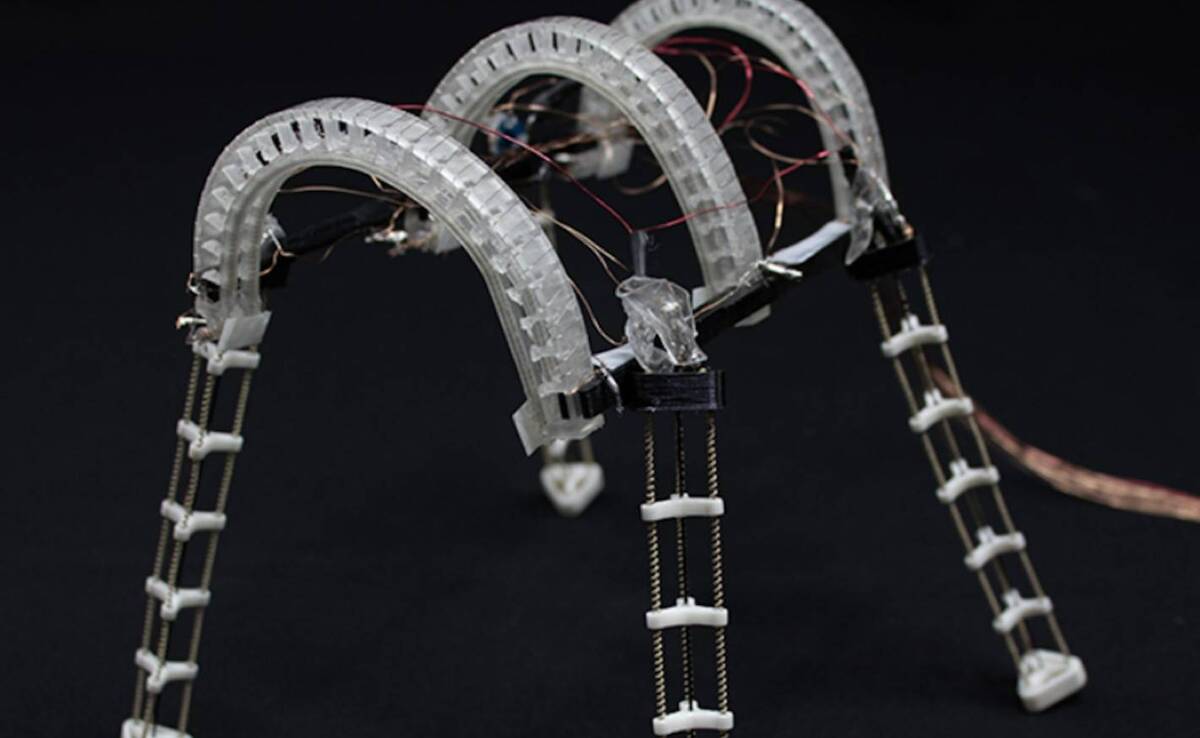
به گزارش خبرنگار خبرگزاری علم و فناوری آنا، این ربات دوزیست میتواند بسته به موانع محیطی خود، شنا کند، راه برود و بخزد؛ ویژگی که تا حد زیادی به لطف عضلات مصنوعی سبک وزن آن حاصل شده که نیازی به منابع سنگین وزن تولید انرژی ندارند.
توسعه این سیستمهای جدید از سال 2017 توسط گروهی از دانشپژوهان به سرپرستی پروفسور «جیانگو ژائو» در دانشکده مهندسی مکانیک دانشگاه کلرادو آغاز شده است. این سیستم بر موادی متکی است که استحکام و سفتی آن بر اساس دما تغییر میکند.
ژائو می گوید: سامانه طراحی شده ما از یک عضله مصنوعی سبک شبیه به ماهیچههای انسان استفاده میکند و با اعمال الکتریسیته منقبض میشود. با تعبیه این ماهیچه های مصنوعی در ستون فقرات ربات یا در پوست آن، می توانیم به انواع شکل ها دست پیدا کنیم.
در مجموع، این رویکرد مسیر امیدوارکنندهای را به سمت توسعه رباتهایی ارائه می کند که میتوانند در محیطهای سخت و دشوار حرکت و کار کنند.
این ربات ها، جدا از خواص الکتریکی، تا حد زیادی حرکات خود را مدیون قورباغهها یا به عبارت بهتر، مراحل زندگی چندگانه قورباغهها، هستند.
به گفته ژائو، قورباغه ها در مراحل اولیه زندگی، قبل از رشد پاها، از دُم شان برای شنا کردن، پریدن و خزیدن استفاده می کنند. ما از آن دگردیسی الهام میگیریم، اما دستیابی به اشکال در هم تنیده شبه حیوانی در رباتها، همچنان چالش برانگیز است و چیزی است که امیدواریم این پژوهش بتواند به آن بپردازد.
با مشاهده تصاویر مونتاژ شده ویدیویی، به راحتی می توان شباهت این روبات به قورباغه را دید. این رباتها بسته به محیط و زمین، میتوانند اندامهای خود را برای «شنا کردن» منحنی کنند، سپس آنها را متناسب با یک مانع صخرهای که شبیه خط ساحلی است، تنظیم کنند.
در خشکی، رباتهای ژائو میتوانند با چرخش مکرر 360 درجه ای اندام خود به سمت جلو «پرش» کنند.
نسخه سوم ربات میتواند خود را صاف کند تا از منافذ کوچک عبور کند و همچنین به یک برامدگی آویزان شود تا بتواند از بین شکاف ها بگذرد.
با این حال، هنوز این رباتها به کنترل از راه دور نیاز دارند، اما نسخه های بعدی در آینده میتوانند بر روی آنالیز مبتنی بر حسگر و دوربین محیطهایشان برای ناوبری و حرکت تکیه کنند و حتی در صورت نیاز برای مدیریت محیط اطراف خود، تغییر شکل دهند.
نتایج این تحقیقات در نشریه Nature Communications منتشر شده است.
انتهای پیام/